Overview
For this project, I’ve programmed an array of stepper motors to play music from a Midi file. The code is written in C and runs on an ESP32. This gave me a chance to combine my two favorite hobbies: programming and music. Super fun!
What is a stepper motor?
A stepper motor is an electrical motor that rotates in a series of discrete steps. Like all other electric motors, it is made up of a stationary part (stator) and a rotating part (rotor).
The stator consists of several coils of wire (electromagnets) that are organized in groups called phases, with one phase consisting of two opposite coils. The rotor (rotating part) has a magnet within it that will align with these phases. By energizing each phase in sequence, the motor will rotate.

Cross-section of a stepper motor. (EEPower)
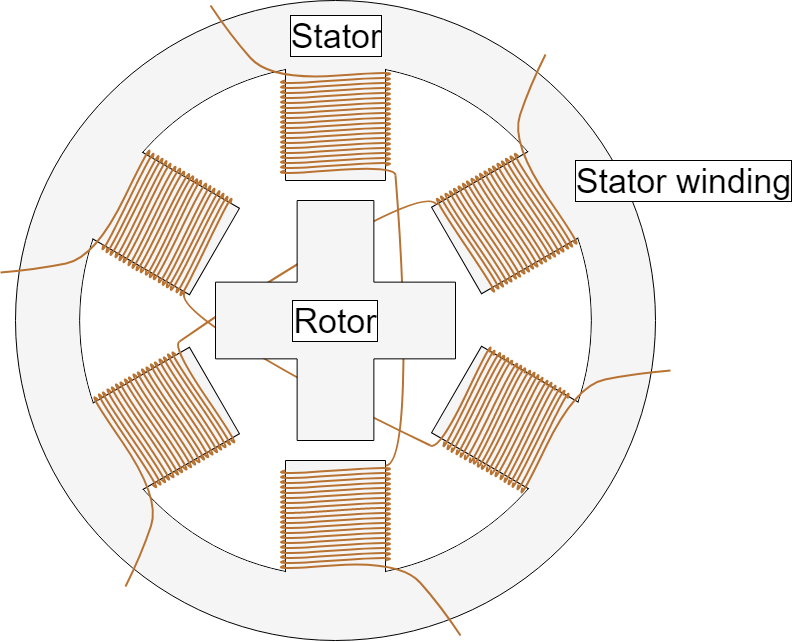
Diagram of a stepper motor. (Monolithic Power)
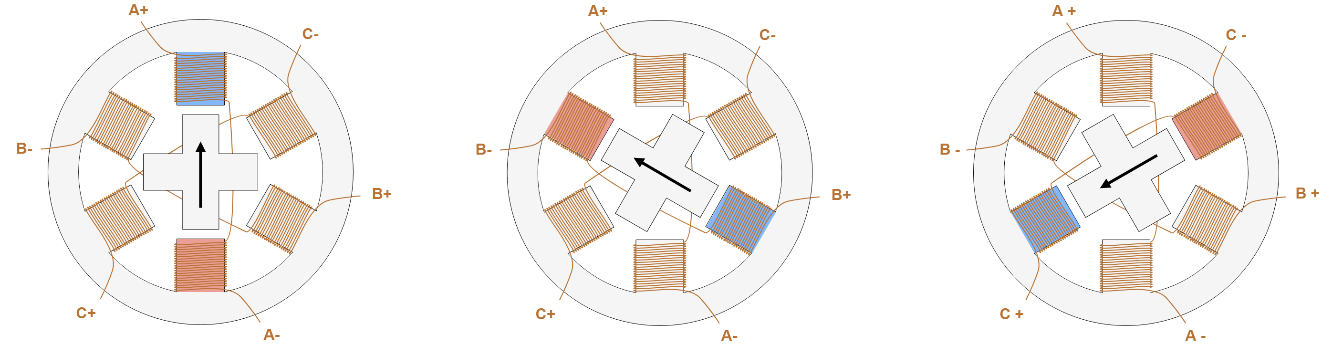
The rotor aligning to different phases. This stepper has three phases. (Monolithic Power)
Why do stepper motors make noise when they rotate?
To be honest, I’m not really sure. I keep coming up with different answers that all sound solid every time I look, so here are all of the answers I found.
1. Mechanical
When the next phase is activated, it takes time for the rotor to perfectly align. The graph below shows how the position of the rotor oscillates around the target point until it finally settles. This vibration in the rotor can be audible.
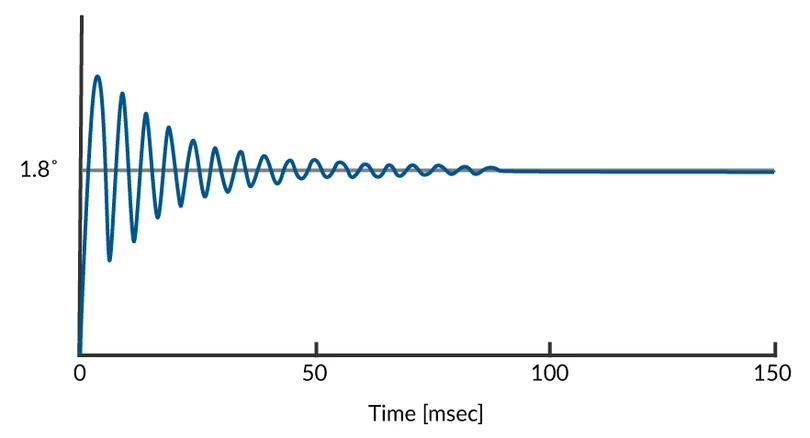
Ringing after a single full step advance. (PMD Corp)
2. Electrical
Another reason is the large number of electrical cycles per mechanical rotation. Just moving the rotor forwards or backwards requires the controller to constantly cycle the command voltages up and down for each phase, which induces noise in the coils and therefore the motor. (PMD Corp)
3. Magnetic
Magnetostriction is a property of ferromagnetic materials causing them to expand or contract under the influence of a magnetic field. This is principle causes transformers to make that low-pitched humming sound, as the alternating currents within the transformer produce a changing magnetic field. In a stepper motor, magnetostriction pulls the rotor and stator teeth toward each other, causing audible noise.
Playing notes with the stepper motors
I used Nema 17 stepper motors with A4988 stepper driver boards. The driver boards let me control the stepper motor with a PWM signal from just one pin on the ESP32. This was very nice - prior to getting the driver boards, I was connecting the four pins of the stepper motor to the ESP32 directly and controlling each pin within a full step drive state machine. It sucked. (And I ran out of pins really fast.)
To play a note with a stepper motor, you adjust the frequency of the PWM signal to match the note you want. (The duty cycle of the signal doesn’t matter.) Below are all the frequencies corresponding to each note.
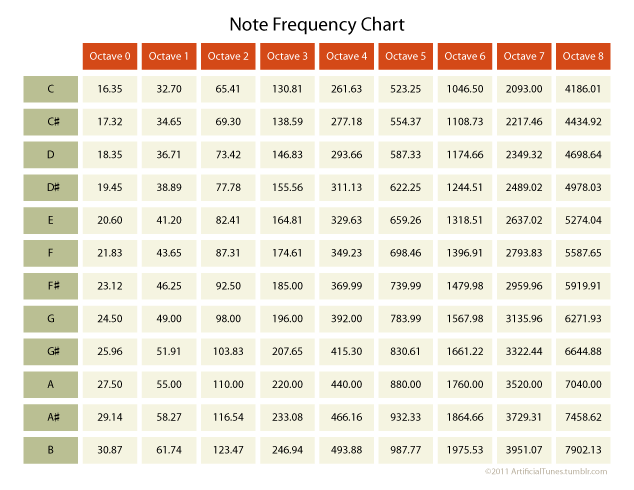
Note frequency chart. (Poly-Ed)
The main part of this project is generating multiple stable PWM signals with the ESP32. Here’s a quick summary of what my options were:
- The built-in LED control unit has 16 PWM channels but only supports 4 concurrent integer frequencies. This means you are limited to 4 notes at a time and some of the notes (lower ones, mainly) might be pitchy.
- The 2 motor control PWM (mcpwm) units have 3 pairs of PWM outputs each, but the maximum frequency is 2kHz.
- There are 4 hardware timers which you can define callbacks for. You can implement software PWM using these and get a theoretically pitch-perfect note, but it’s very inefficient for the frequency range that this application requires.
I did software PWM first because I wanted things to be pitch-perfect, but that didn’t work out very well - the poor little ESP32 couldn’t execute all the callbacks fast enough and it sounded like a garbled mess. Then I switched to using LEDC since I only had 5 steppers anyways. I ended up not noticing anything wrong with the pitch.
Parsing the Midi file
I used abique’s midi library. It reads the file and maps it to memory with mmap(), but reading files on ESP32 takes an irritating amount of setup, so I just convert the Midi files to a byte array in a header file with xxd --include and patched the library a little to accomodate that. I wrote a simple bash script to do the conversion and compilation automatically.
Keeping time
Midi files consist of a stream of events in chronological order. Each event consists of the following:
- event type (i.e.
NOTE_ON,NOTE_OFF) - $\Delta$t (time until the event happens in Midi ticks)
- other parameters depending on the event type
NOTE_ONhas the note number (0 to 127, corresponding to C2 to G8) and velocity (loudness) as parametersNOTE_OFFhas the note number as a parameter
A Midi tick is a length of time whose duration is defined by the time division (aka time signature) and tempo of the piece. The time division is given in Midi ticks per quarter note and the tempo is given in microseconds per quarter note. Using this information, you can calculate how many microseconds there are in one Midi tick.
$$ \text{tempo} * \frac{1}{\text{time division}} = \frac{\mu\text{sec}}{\text{Midi ticks}} $$ $$ \downarrow $$ $$ \frac{\mu\text{sec}}{\text{qtr note}} * \frac{\text{qtr note}}{\text{Midi ticks}} = \frac{\mu\text{sec}}{\text{Midi ticks}} $$
To keep time, I find the delta time til the next event, then I execute the current event and delay for that delta time. Then I move on to the next event - rinse and repeat.
Conclusion
This was a very fun project that I hope to extend in the future!